그랩컷
: Grabcut - Graph cut 기반 영역 분할 알고리즘
- 영상의 픽셀을 그래프 정점으로 갖누하고, 픽셀들을 두 개의 그룹으로 나누는 최적의 컷을 찾는 방식
참고 page
https://grabcut.weebly.com/background--algorithm.html
https://www.cs.ru.ac.za/research/g02m1682/
https://docs.opencv.org/3.4/d8/d83/tutorial_py_grabcut.html
OpenCV: Interactive Foreground Extraction using GrabCut Algorithm
Goal In this chapter We will see GrabCut algorithm to extract foreground in images We will create an interactive application for this. Theory GrabCut algorithm was designed by Carsten Rother, Vladimir Kolmogorov & Andrew Blake from Microsoft Research Cambr
docs.opencv.org
"GrabCut"
www.cs.ru.ac.za
Background & Algorithm
**Disclaimer - In the following, the royal 'We' is being used - mostly as a reference to the "Grab Cut" paper authors.** Background The Grab Cut method addresses the challenge of separating...
grabcut.weebly.com
그랩컷 영상 분할 동작 방식
1) 사각형 지정 자동 분할
2) 사용자가 지정한 foreground/background 정보를 활용하여 영상 분할

= 각각의 pixel을 vertex로 인식해서 최적의 위치를 Cut하는 line을 찾는 것이 목표.
그랩컷 함수
cv2.grabCut(img, mask, rect, bgdModel, fgdModel, iterCount, mode=None) -> mask, bgdModel, fgdModel- img : 입력 영상. 8비트 3채널
- mask : 입출력 마스크. cv2.GCBGD[0], cv2.GC_FGD[1], cv2.PR_BGD[2], cv2.GC_PR_FGD[3] 네 개의 값으로 구성되어 있으며 cv2.GC_INIT_WITH_RECT 모드로 초기화
- rect : ROI 영역. cv2.GC_INIT_WITH_RECT 모드에서만 사용됨
- bgdModel : 임시 배경 모델 행렬. 같은 영상 처리 시에는 변경 금지
→ background - fgdModel : 임시 전경 모델 행렬. 같은 영상 처리 시에는 변경 금지
→ foreground - iterCount : 결과 생성을 위한 반복 횟수
- mode : cv2.GC로 시작하는 모드 상수. 보통 cv2.GC_INIT_WITH_RECT 모드로 초기화하고, cv2.GC_INIT_WITH_MASK 모드로 업데이트함
예시 코드
니모 분리하기
import sys
import numpy as np
import cv2
# 입력 영상 불러오기
src = cv2.imread('nemo.jpg')
if src is None:
print('Image load failed!')
sys.exit()
# 사각형 지정을 통한 초기 분할
rc = cv2.selectROI(src) # ROI Selector 창이 뜨면 사각형 영역을 지정해주면 됨
mask = np.zeros(src.shape[:2], np.uint8) # 검정색으로 입력 영상과 동일한 크기의 mask 생성
cv2.grabCut(src, mask, rc, None, None, 5, cv2.GC_INIT_WITH_RECT)
# 5번 iteration
# 0: cv2.GC_BGD, 2: cv2.GC_PR_BGD
mask2 = np.where((mask == 0) | (mask == 2), 0, 1).astype('uint8')
# 0과 2가 background이므로 background는 0으로, foreground는 1로 set
dst = src * mask2[:, :, np.newaxis]
# 초기 분할 결과 출력
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
G.O.A.T 분리하기
import sys
import numpy as np
import cv2
# 입력 영상 불러오기
src = cv2.imread('ironman.webp')
if src is None:
print('Image load failed!')
sys.exit()
# 사각형 지정을 통한 초기 분할
mask = np.zeros(src.shape[:2], np.uint8) # 마스크
bgdModel = np.zeros((1, 65), np.float64) # 배경 모델
fgdModel = np.zeros((1, 65), np.float64) # 전경 모델
# bgd와 fgd는 무조건 1행 65열짜리 이미지로 만들어줘야함
rc = cv2.selectROI(src)
cv2.grabCut(src, mask, rc, bgdModel, fgdModel, 1, cv2.GC_INIT_WITH_RECT)
# 0: cv2.GC_BGD, 2: cv2.GC_PR_BGD
mask2 = np.where((mask == 0) | (mask == 2), 0, 1).astype('uint8')
dst = src * mask2[:, :, np.newaxis]
# 초기 분할 결과 출력
cv2.imshow('dst', dst)
# 마우스 이벤트 처리 함수 등록
def on_mouse(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
cv2.circle(dst, (x, y), 3, (255, 0, 0), -1)
cv2.circle(mask, (x, y), 3, cv2.GC_FGD, -1)
cv2.imshow('dst', dst)
elif event == cv2.EVENT_RBUTTONDOWN:
cv2.circle(dst, (x, y), 3, (0, 0, 255), -1)
cv2.circle(mask, (x, y), 3, cv2.GC_BGD, -1)
cv2.imshow('dst', dst)
elif event == cv2.EVENT_MOUSEMOVE:
if flags & cv2.EVENT_FLAG_LBUTTON:
cv2.circle(dst, (x, y), 3, (255, 0, 0), -1)
cv2.circle(mask, (x, y), 3, cv2.GC_FGD, -1)
cv2.imshow('dst', dst)
elif flags & cv2.EVENT_FLAG_RBUTTON:
cv2.circle(dst, (x, y), 3, (0, 0, 255), -1)
cv2.circle(mask, (x, y), 3, cv2.GC_BGD, -1)
cv2.imshow('dst', dst)
# 마우스 좌클릭 : foreground, 우클릭 : background
cv2.setMouseCallback('dst', on_mouse) # 마우스 이벤트 받아오기
while True:
key = cv2.waitKey()
if key == 13: # ENTER
# 사용자가 지정한 전경/배경 정보를 활용하여 영상 분할
cv2.grabCut(src, mask, rc, bgdModel, fgdModel, 1, cv2.GC_INIT_WITH_MASK)
mask2 = np.where((mask == 2) | (mask == 0), 0, 1).astype('uint8')
dst = src * mask2[:, :, np.newaxis]
cv2.imshow('dst', dst)
elif key == 27:
break
cv2.destroyAllWindows()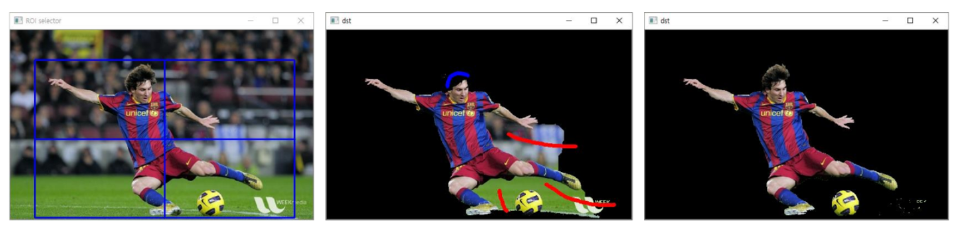
모멘트 기반 객체 검출
모멘트
: 영상의 형태를 표현하는 일련의 실수값
- 특정 함수 집합과의 상관 관계 형태로 계산
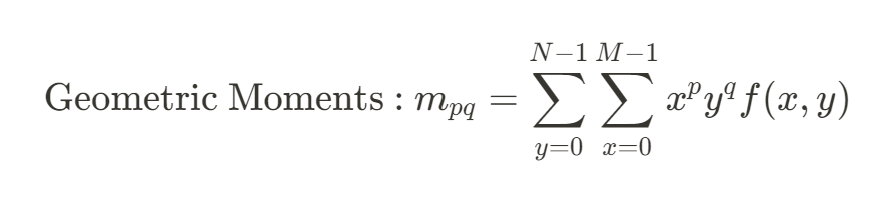
→ Geometric Moments, Central Moments, Normalized central Moments 사용 가능
HU의 7개 불변 모멘트
1) 3차 이하의 정규화된 중심 모멘트를 조합하여 만든 7개의 모멘트 값
2) 영상의 크기, 회전, 이동, 대칭 변환에 불변
→ 객체에 변형이 있어도 모멘트 값에는 변화가 없음
모양 비교 함수
cv2.matchShapes(contour1, contour2, method, parameter)
-> retval
- contour1 : 첫 번째 외곽선 또는 그레이스케일 영상
- contour2 : 두 번째 외곽선 또는 그레이스케일 영상
- method : 비교 방법 지장. cv2.CONTOURS_MATCH_I1, cv2.CONTOURS_MATCH_I2, cv2.CONTOURS_MATCH_I3 중 하나 사용.
- parameter : 사용되지 않음. 0 지정
- retval : 두 외곽선 또는 그레이스케일 영상 사이의 거리 [distance]
- 참고 사항
→ HU의 불변 모멘트를 이용하여 두 외곽선 또는 영상의 모양을 비교
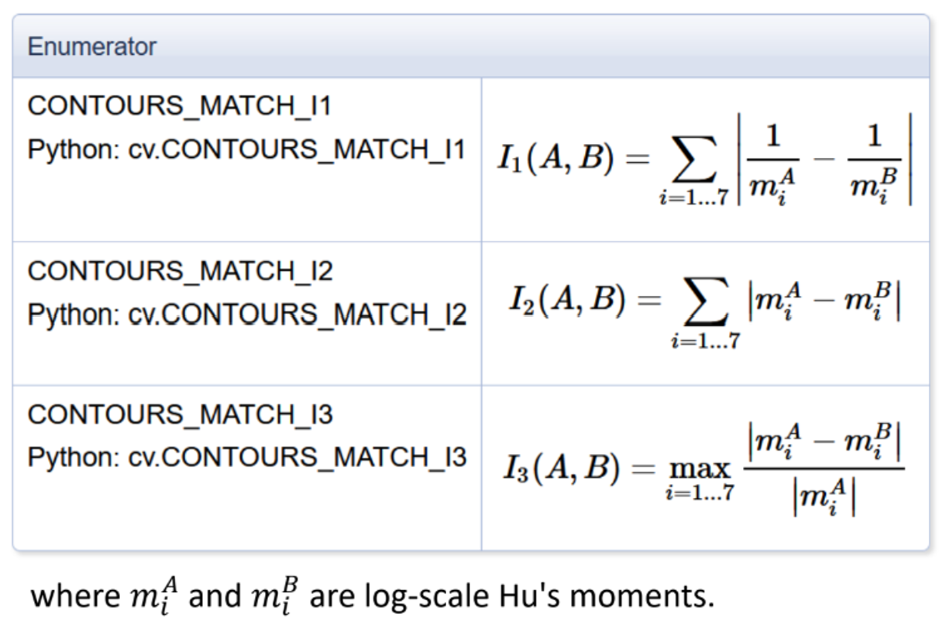
... 3번째 방법이 정규화도 포함되어 있기 때문에 가장 좋은 방법이라고 함
import sys
import numpy as np
import cv2
# 영상 불러오기
obj = cv2.imread('spades.png', cv2.IMREAD_GRAYSCALE)
src = cv2.imread('symbols.png', cv2.IMREAD_GRAYSCALE)
if src is None or obj is None:
print('Image load failed!')
sys.exit()
# 객체 영상 외곽선 검출
_, obj_bin = cv2.threshold(obj, 128, 255, cv2.THRESH_BINARY_INV)
# 중간값과 끝값을 이용해서 반전
obj_contours, _ = cv2.findContours(obj_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# 외곽선 검출
obj_pts = obj_contours[0]
# 입력 영상 분석
_, src_bin = cv2.threshold(src, 128, 255, cv2.THRESH_BINARY_INV)
contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# 결과 영상
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
# 입력 영상의 모든 객체 영역에 대해서
for pts in contours:
if cv2.contourArea(pts) < 1000:
continue
rc = cv2.boundingRect(pts)
cv2.rectangle(dst, rc, (255, 0, 0), 1)
# 모양 비교
dist = cv2.matchShapes(obj_pts, pts, cv2.CONTOURS_MATCH_I3, 0)
# distance 값 return
cv2.putText(dst, str(round(dist, 4)), (rc[0], rc[1] - 3),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 0, 0), 1, cv2.LINE_AA)
# distance 값을 화면에 출력
if dist < 0.1:
cv2.rectangle(dst, rc, (0, 0, 255), 2)
#distance 값이 0.1보다 작으면 같은 객체로 인식
cv2.imshow('obj', obj)
cv2.imshow('dst', dst)
cv2.waitKey(0)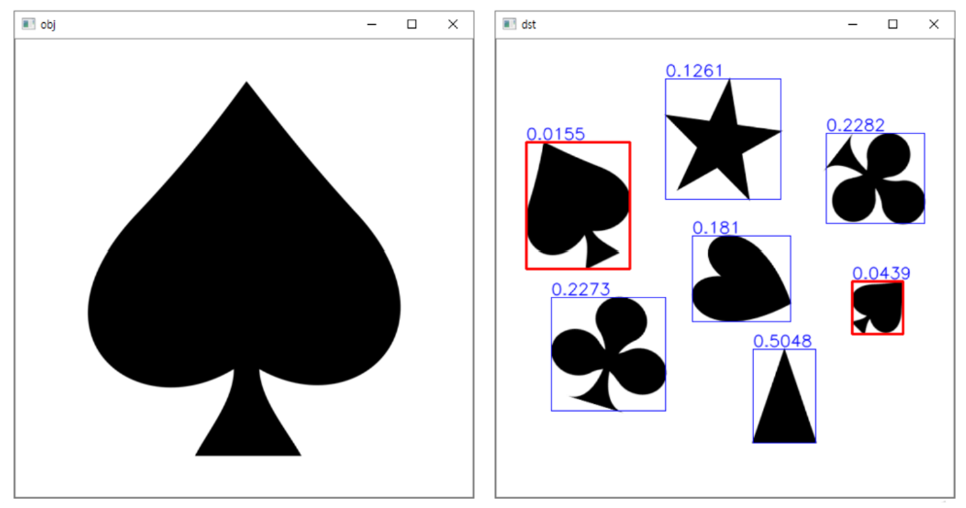
템플릿 매칭 [1] : 이해하기
템플릿 매칭
: 입력 영상에서 [작은 크기의] 템플릿 영상과 일치하는 부분을 찾는 기법
- 템플릿 : 찾을 대상이 되는 작은 영상. patch
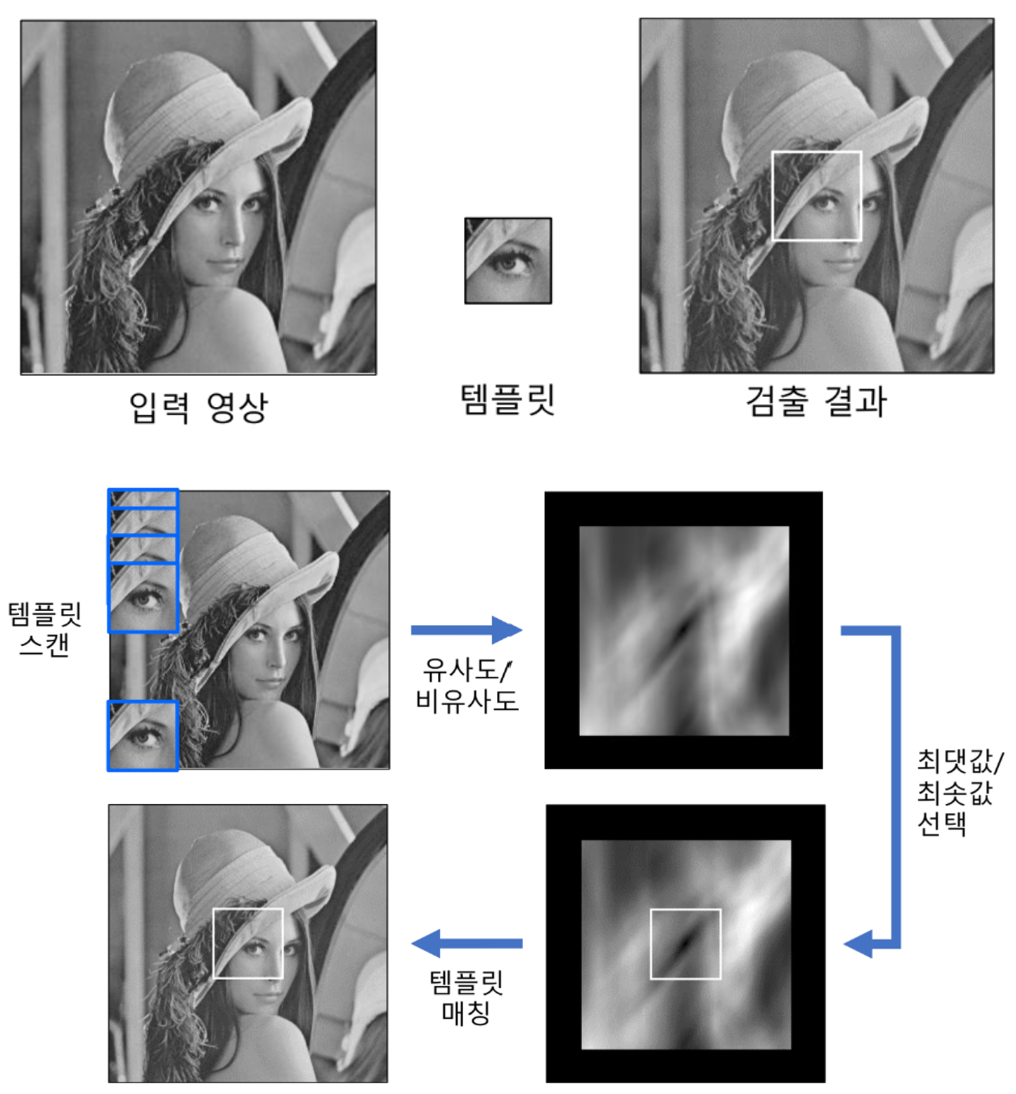
→ 유사도인 경우 최댓값을 matching, 비유사도인 경우 최솟값을 matching
템플릿 매칭 함수
cv2.matchTemplate(image, templ, method, result=None, mask=None) -> result- image : 입력 영상. 8비트 또는 32비트
- templ : 템플릿 영상. image보다 같거나 작은 크기, 같은 타입
- method : 비교 방법. cv2.TM_ 으로 시작하는 플래그 지정

- result : 비교 결과 행렬. numpy.ndarray.dtype=numpy.float32
image의 크기가 W x H이고, templ의 크기가 w x h이면 result 크기는 [W-w+1] x [H-h+1]
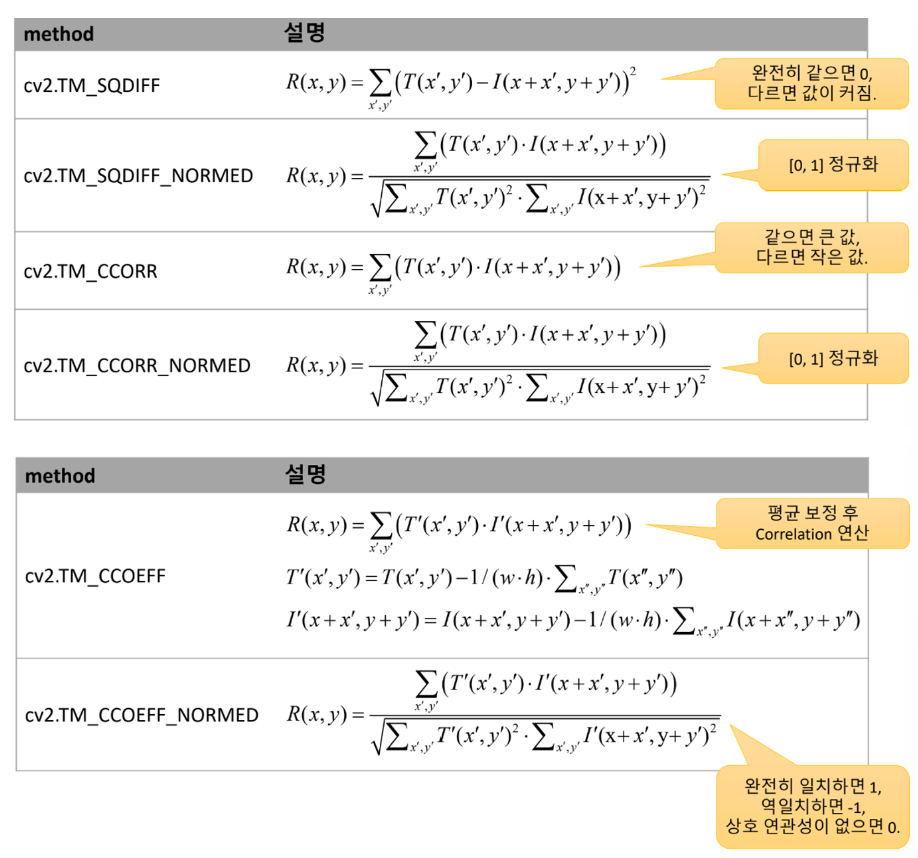
→ 밝기에 대한 보정을 한 뒤 연산을 진행한 결과물이 훨씬 더 좋음
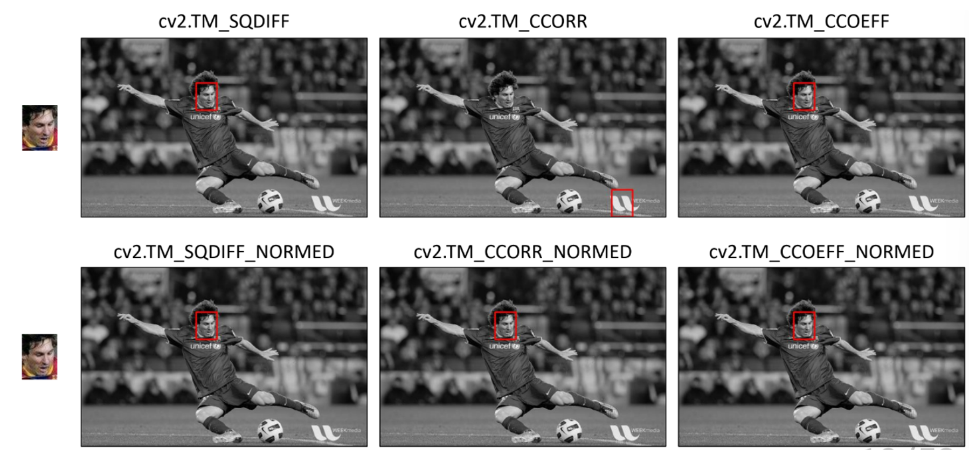
- 두 번째 사진 (TM_CCORR)의 경우 얼굴 인식이 제대로 되지 않았는데, 흰색 부분의 Correlation 값이 크게 나오기 때문에 NORMED를 하거나 Normalize를 한 후 사용하는 것이 좋음
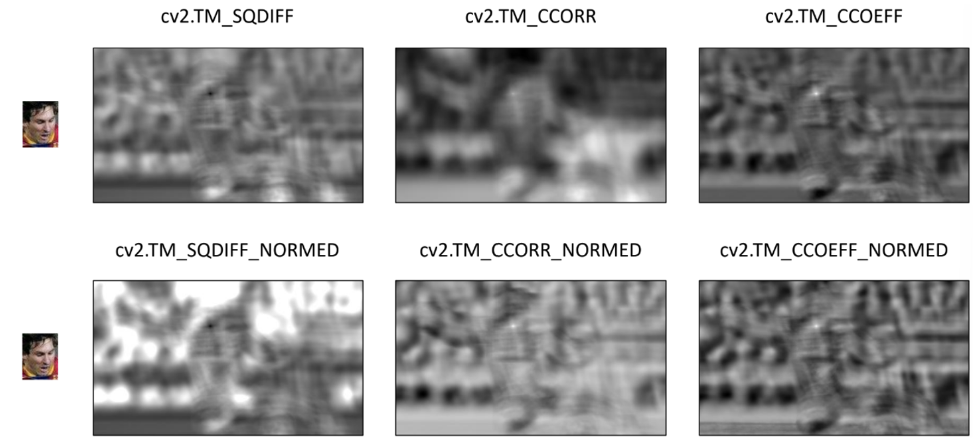
- TM_SQDIFF : distance return
- TM_CCORR : Correlation을 찾아서 위치 return
예시 코드
import sys
import numpy as np
import cv2
# 입력 영상 & 템플릿 영상 불러오기
src = cv2.imread('circuit.bmp', cv2.IMREAD_GRAYSCALE)
templ = cv2.imread('crystal.bmp', cv2.IMREAD_GRAYSCALE)
if src is None or templ is None:
print('Image load failed!')
sys.exit()
# 입력 영상 밝기 50증가, 가우시안 잡음(sigma=10) 추가
noise = np.zeros(src.shape, np.int32)
cv2.randn(noise, 50, 10) # 가우시안 형태의 random number generate
src = cv2.add(src, noise, dtype=cv2.CV_8UC3) # src에 noise를 더해줌
# 템플릿 매칭 & 결과 분석
res = cv2.matchTemplate(src, templ, cv2.TM_CCOEFF_NORMED)
res_norm = cv2.normalize(res, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
_, maxv, _, maxloc = cv2.minMaxLoc(res) # minv,maxv,minloc,maxloc을 return하는데 max만 사용함
print('maxv:', maxv)
print('maxloc:', maxloc)
# 매칭 결과를 빨간색 사각형으로 표시
th, tw = templ.shape[:2]
dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR)
cv2.rectangle(dst, maxloc, (maxloc[0] + tw, maxloc[1] + th), (0, 0, 255), 2)
# 결과 영상 화면 출력
cv2.imshow('res_norm', res_norm)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
>>>
maxv: 0.9796600341796875
maxloc: (568, 320)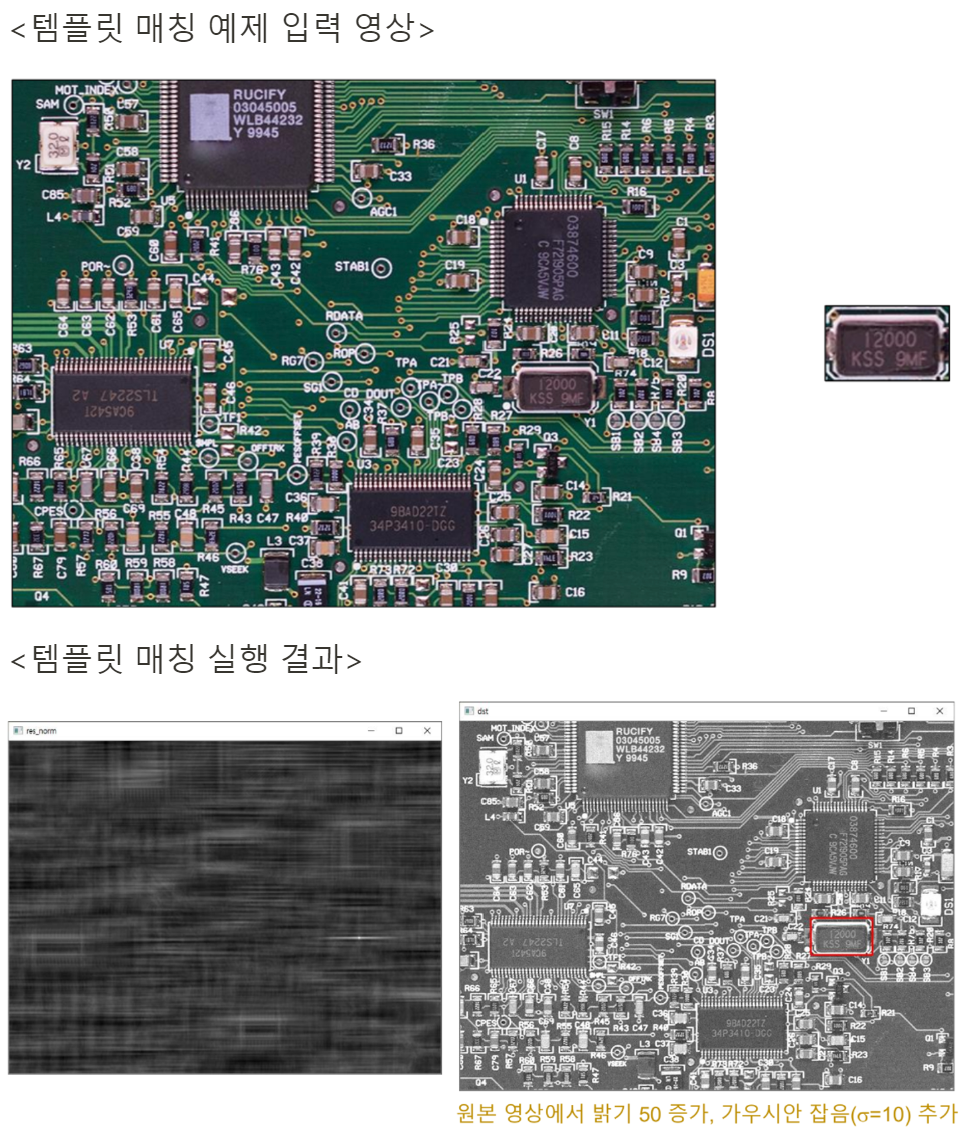
템플릿 매칭 [2] : 인쇄체 숫자 인식
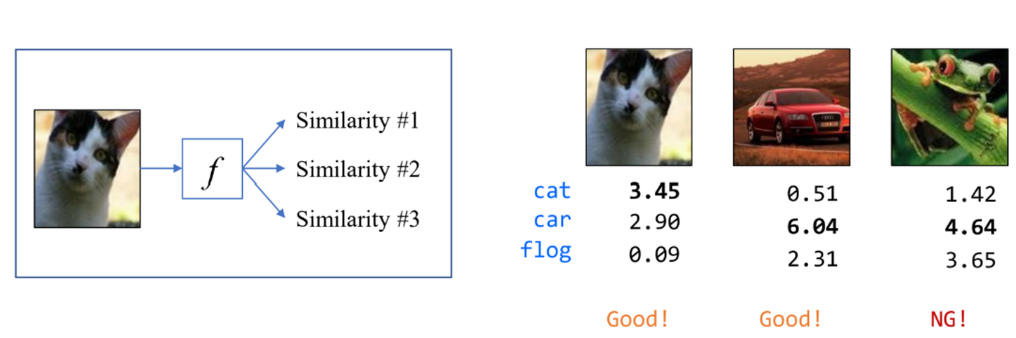
인식
: 여러 개의 클래스 중에서 가장 유사한 클래스를 선택하는 것
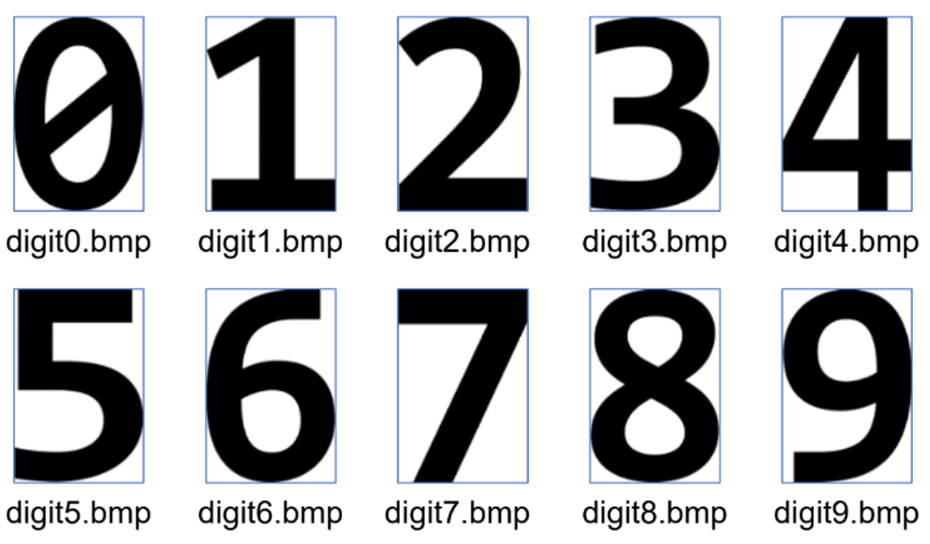
숫자 템플릿 영상 생성
1) Consolas 폰트로 쓰여진 숫자 영상을 digit0.bmp ~ digit9.bmp로 저장
2) 각 숫자 영상의 크기는 100x150 크기로 정규화
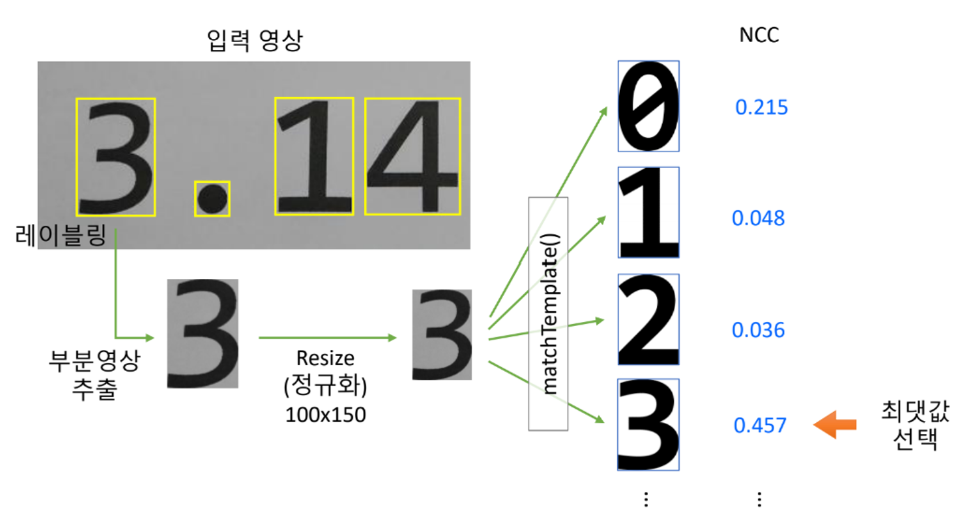
인쇄체 숫자 인식 방법
import sys
import numpy as np
import cv2
def load_digits():
img_digits = []
for i in range(10):
filename = './digits/digit{}.bmp'.format(i)
img_digits.append(cv2.imread(filename, cv2.IMREAD_GRAYSCALE))
if img_digits[i] is None:
return None
return img_digits
def find_digit(img, img_digits):
max_idx = -1
max_ccoeff = -1
# 최대 NCC 찾기
for i in range(10):
img = cv2.resize(img, (100, 150))
res = cv2.matchTemplate(img, img_digits[i], cv2.TM_CCOEFF_NORMED)
if res[0, 0] > max_ccoeff:
max_idx = i
max_ccoeff = res[0, 0]
return max_idx
def main():
# 입력 영상 불러오기
src = cv2.imread('digits_print.bmp')
if src is None:
print('Image load failed!')
return
# 100x150 숫자 영상 불러오기
img_digits = load_digits() # list of ndarray
if img_digits is None:
print('Digit image load failed!')
return
# 입력 영상 이진화 & 레이블링
src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
_, src_bin = cv2.threshold(src_gray, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)
cnt, _, stats, _ = cv2.connectedComponentsWithStats(src_bin)
# 숫자 인식 결과 영상 생성
dst = src.copy()
for i in range(1, cnt):
(x, y, w, h, s) = stats[i]
if s < 1000:
continue
# 가장 유사한 숫자 이미지를 선택
digit = find_digit(src_gray[y:y+h, x:x+w], img_digits)
cv2.rectangle(dst, (x, y, w, h), (0, 255, 255))
cv2.putText(dst, str(digit), (x, y - 4), cv2.FONT_HERSHEY_SIMPLEX,
1, (0, 255, 255), 2, cv2.LINE_AA)
cv2.imshow('dst', dst)
cv2.waitKey()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()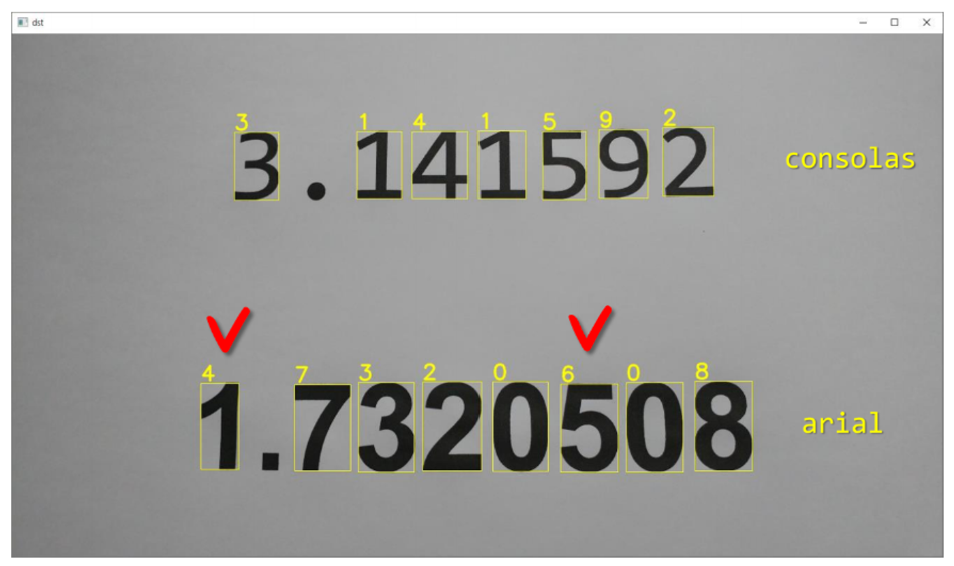
두 숫자의 글꼴이 달라서 consolas 글꼴은 제대로 인식을 하지만, arial 글꼴은 제대로 인식을 하지 못하는 것을 알 수 있음
캐스케이드 분류기 : 얼굴 검출
https://docs.opencv.org/4.x/db/d28/tutorial_cascade_classifier.html
OpenCV: Cascade Classifier
Prev Tutorial: Optical Flow Next Tutorial: Cascade Classifier Training Original author Ana Huamán Compatibility OpenCV >= 3.0 Goal In this tutorial, We will learn how the Haar cascade object detection works. We will see the basics of face detection and ey
docs.opencv.org
Viola-Jones 얼굴 검출기
: Positive 영상 [얼굴 영상]과 Negative 영상 [얼굴 아닌 영상]을 훈련하여 빠르고 정확하게 얼굴 영역을 검출
- 기존 방법과의 차별점
- 유사 하르 특징을 사용
- AdaBoost에 기반한 강한 분류 성능
- Cascade (외관) 방식을 통한 빠른 동작 속도
- 기존 얼굴 검출 방법보다 약 15배 빠르게 동작
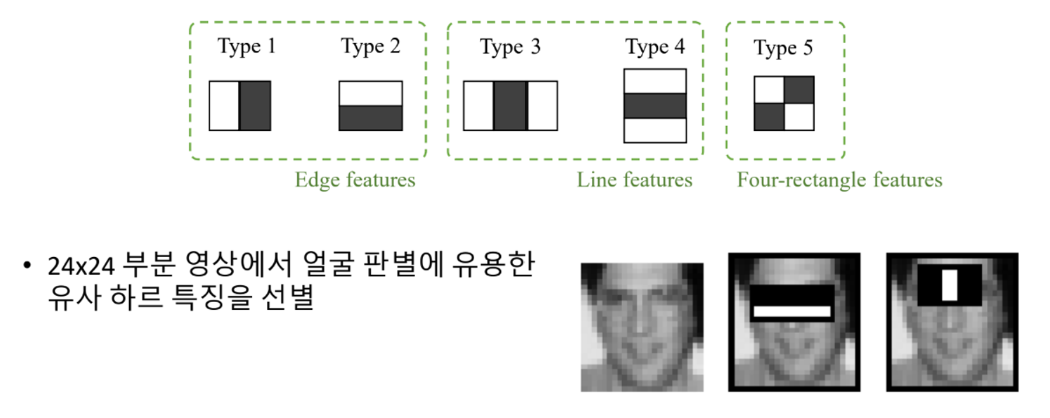
유사 하르 특징 [Harr-like features]
- 사각형 형태의 필터 집합을 사용
- 흰색 사각형 영역 값의 합에서 검정색 사각형 영역 픽셀 값을 뺀 결과 값을 추출
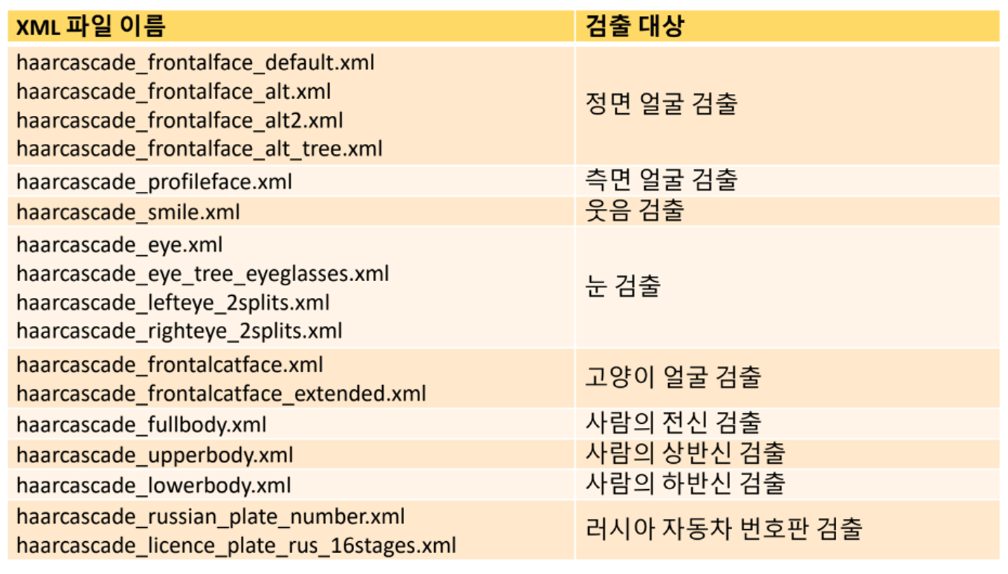
cv2.CascadeClassifier 객체 생성 및 학습 데이터 불러오기
cv2.CascadeClassifier() -> <CascadeClassifier Object>
cv2.CascadeClassifier(filename) -> <CascadeClassifier Object>
cv2.CascadeClassifier.load(filename) -> retval- filename : XML 파일 이름
- retval : 성공하면 True, 실패하면 False
- CascadeClassifier 멀티스케일 객체 검출 함수
cv2.CascadeClassifier.detectMultiScale(image, scaleFactor=None,
minNeighbors=None, flags=None, minSize=None, maxSize=None) -> result- image : 입력 영상 [cv2.CV_8U]
- scaleFactor : 영상 축소 비율. 기본값은 1.1
- minNeighbors : 얼마나 많은 이웃 사각형이 검출되어야 최종 검출 영역으로 설정할지를 지정. 기본값은 3
- flags : [현재] 사용되지 않음
- minSize : 최소 객체 크기 [w,h] 튜플
- maxSize : 최대 객체 크기. [w,h] 튜플
- result : 검출된 객체의 사각형 정보 [x,y,w,h]를 담은 numpy.ndarray.shape=[N,4].dtype=unmpy.uint32
예제 코드
import sys
import numpy as np
import cv2
src = cv2.imread('lenna.bmp')
if src is None:
print('Image load failed!')
sys.exit()
classifier = cv2.CascadeClassifier('haarcascade_frontalface_alt2.xml')
if classifier.empty():
print('XML load failed!')
sys.exit()
tm=cv2.TickMeter()
tm.start()
faces = classifier.detectMultiScale(src, scaleFactor=1.2, minSize=(100,100))
tm.stop()
print(tm.getTimeMilli())
# parameter를 조절하면 속도를 빠르게 처리할 수 있음
for (x, y, w, h) in faces:
cv2.rectangle(src, (x, y, w, h), (255, 0, 255), 2)
cv2.imshow('src', src)
cv2.waitKey()
cv2.destroyAllWindows()
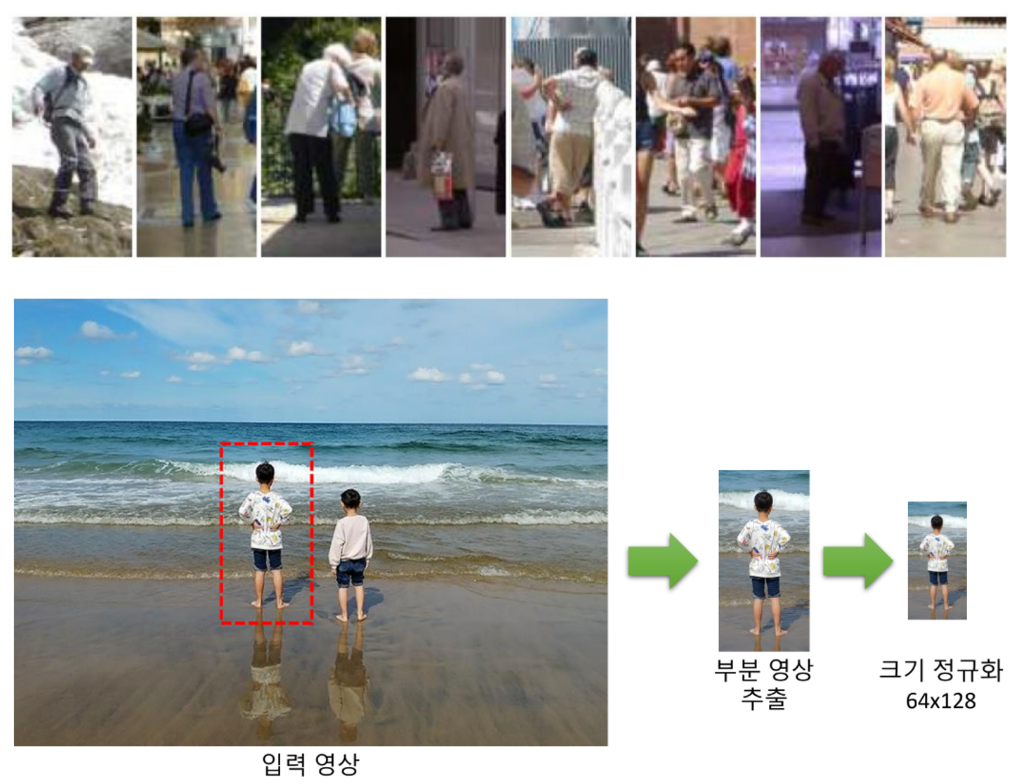
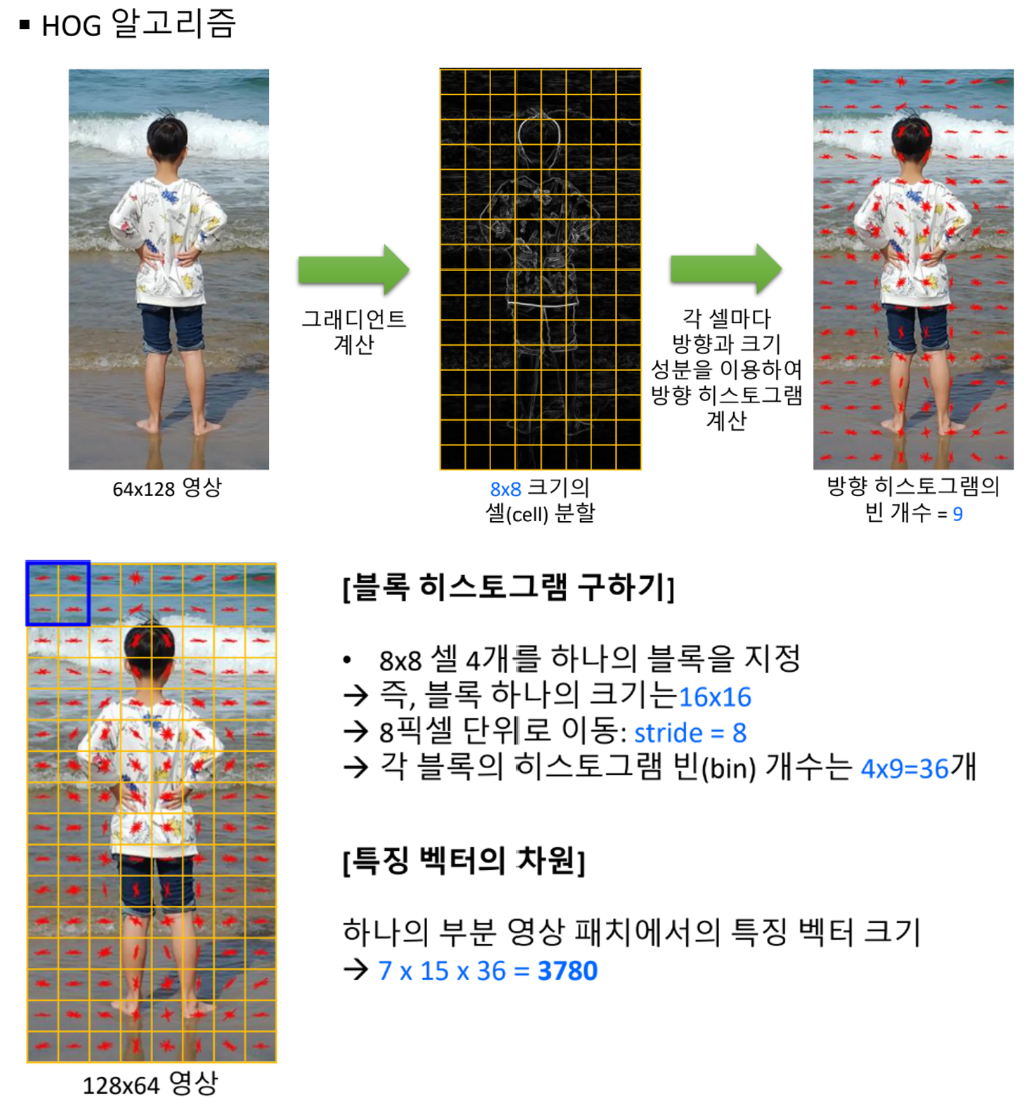
HOG 보행자 검출
HOG [Histogram of Oriented Gradients]
- 영상의 지역적 그래디언트 방향 정보를 특징 벡터로 사용
HOG 기술자 객체 생성 및 보행지 감츨을 위해 학습된 분류기 계수 불러오기
cv2.HOGDescriptor() -> <CascadeClassifier object>
cv2.HOGDescriptor_getDefaultPeopleDetector() -> retvalSVM 분류기 계수 등록하기
cv2.HOGDescriptor.setSVMDetector(svmdetector) -> None- svmdetector : 선형 SVM 분류기를 위한 계수
HOG 멀티스케일 객체 검출 함수
cv2.HOGDescriptor.detectMultiScale(img, hitThreshold=None, winStride=None,
padding=None, scale=None, finalThreshold=None,
useMeanshiftGrouping=None) -> fondLocations, foundWeights- img : 입력 영상. cv2.CV_8UC1 또는 cv2.CV_8UC3
- hitThreshold : 특징 벡터와 SVM 분류 평면까지의 거리에 대한 임계값
- winStride : 셀 윈도우 이동 크기. [0,0] 지정 시 셀 크기와 같게 설정
- padding : 패딩 크기
- scale : 검색 윈도우 크기 확대 비율. 기본값은 1.05
- finalThreshold : 검출 결정을 위한 임계값
- useMeanshiftGrouping : 겹쳐진 검색 윈도우를 합치는 방법 지정 플래그
- foundLocations : [출력] 검출된 사각형 영역 정보
- foundWeights : [출력] 검출된 사각형 영역에 대한 신뢰도
예시 코드
import sys
import random
import numpy as np
import cv2
# 동영상 불러오기
cap = cv2.VideoCapture('vtest.avi')
if not cap.isOpened():
print('Video open failed!')
sys.exit()
# 보행자 검출을 위한 HOG 기술자 설정
hog = cv2.HOGDescriptor()
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())
while True:
ret, frame = cap.read()
if not ret:
break
# 매 프레임마다 보행자 검출
detected, _ = hog.detectMultiScale(frame)
# 검출 결과 화면 표시
for (x, y, w, h) in detected:
c = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
cv2.rectangle(frame, (x, y, w, h), c, 3)
cv2.imshow('frame', frame)
if cv2.waitKey(10) == 27:
break
cv2.destroyAllWindows()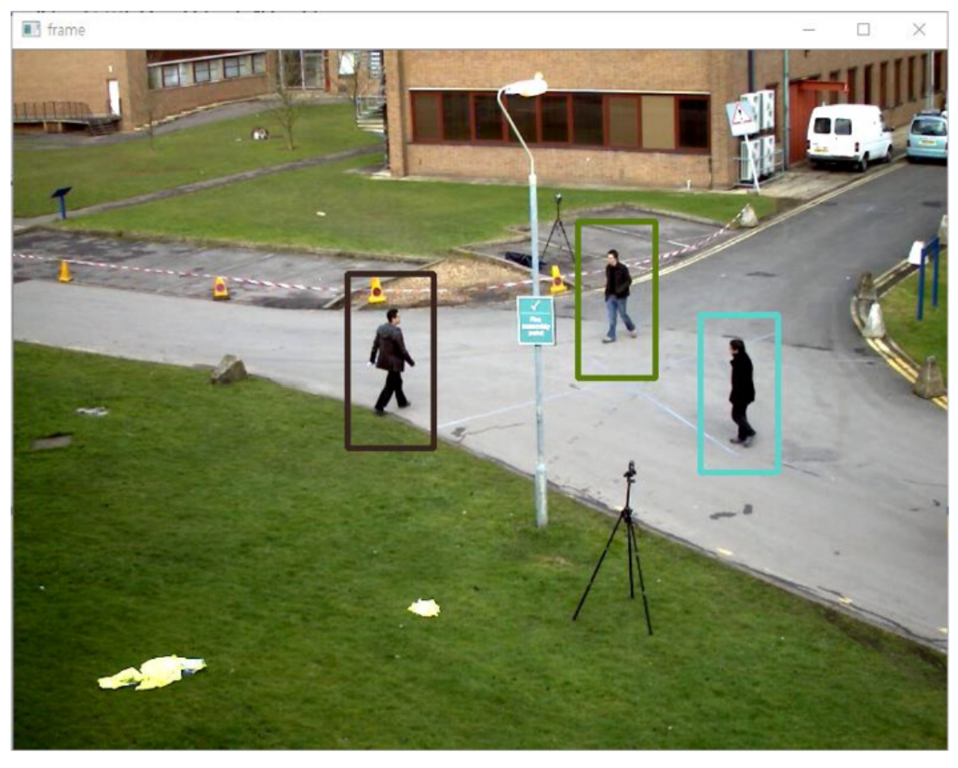
- Chapter8 끝! -

'OpenCV' 카테고리의 다른 글
| [OpenCV] 특징점 검출과 매칭 (0) | 2025.04.04 |
|---|---|
| [OpenCV] 이진 영상 처리 (0) | 2025.04.04 |
| [OpenCV] 영상의 특징 추출 (0) | 2025.04.04 |
| [OpenCV] 기하학적 변환 (0) | 2025.04.04 |
| [OpenCV] 필터링 (1) | 2025.04.04 |